
舟山渊视科技有限公司
我们很想了解您的项目。联系行业专家开始沟通吧。
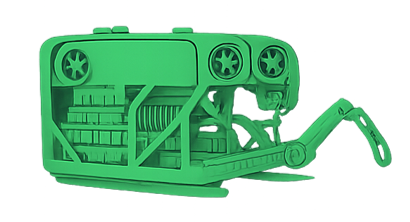
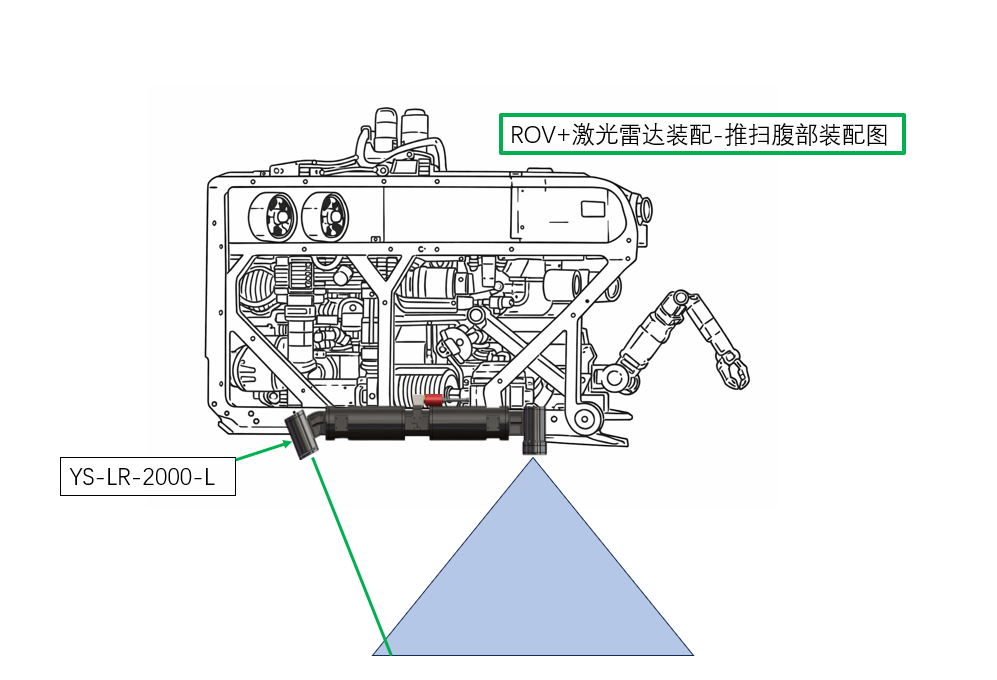
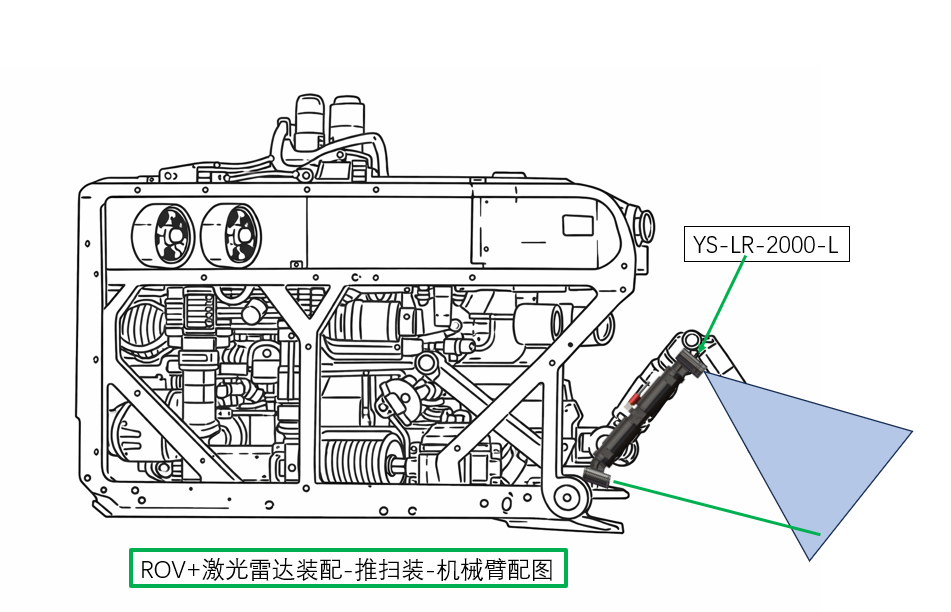
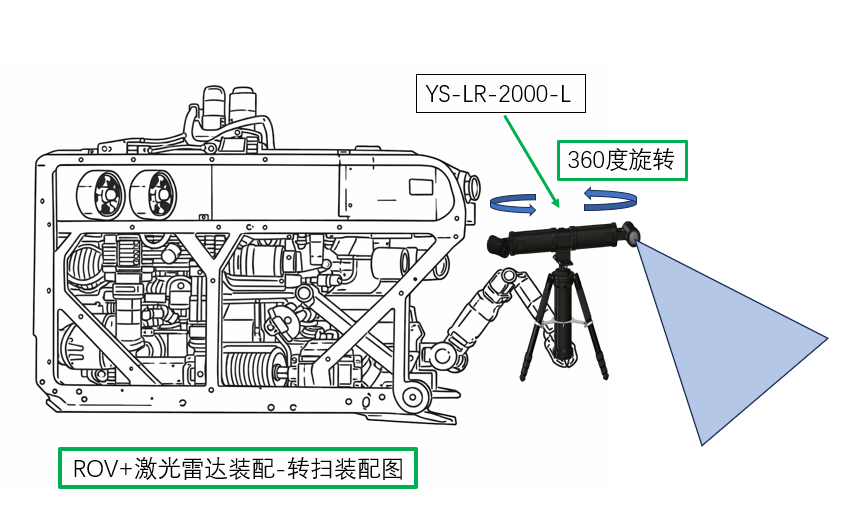
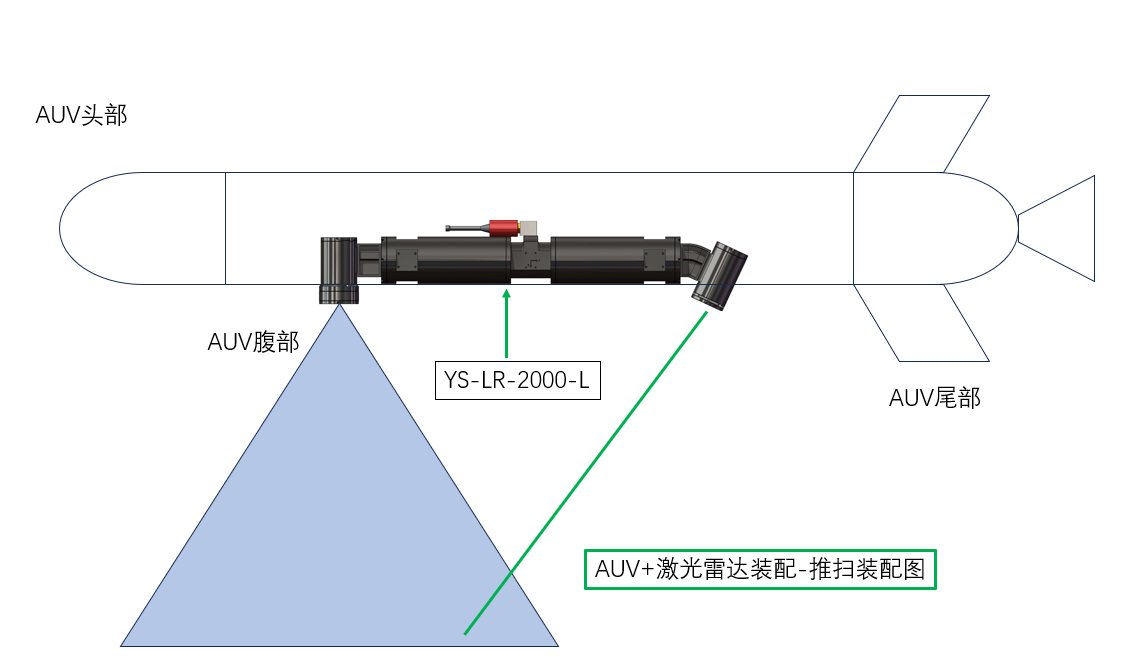
面向复杂水下环境设计,系统可搭载于 ROV/AUV平台,实现水下目标的稳定感知与探测,适用于工程巡检与目标探测任务。
系统采用模块化架构,支持与多型ROV/AUV平台快速集成,降低工程改造与部署成本。
集成扫描、采集与处理模块,实现数据的实时处理与结构化输出,支持任务后的分析与复核。
系统在工程级水域条件下,保持稳定可靠的数据获取能力。
扫码联系我们